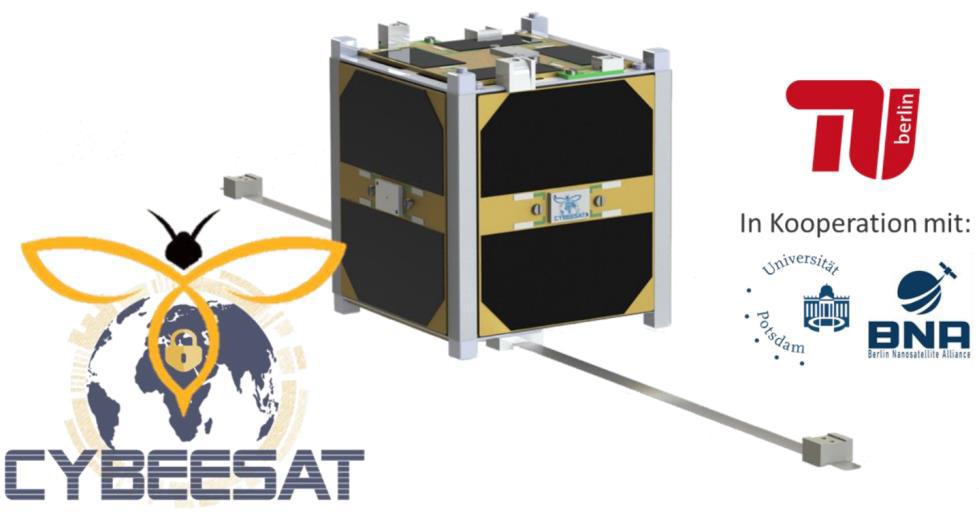
Entwurf basiert auf den Erfahrungen mit der BEESAT-Serie der TU Berlin und des CyBEEsat-Konsortiums der BNA-Mitglieder
Nutzlastkapazität: 0.5U / 1 kg
Alleinstellungsmerkmale: passive Lageregelung und Nutationsdämpfung, Linux-basierter Bordcomputer und Sicherheitsmerkmale
Kommunikationsmodul VCOM für Kurzzeitmissionen im VHF-/UHF-Band
TUBiX5
Quelle: TU BerlinQuelle: TU Berlin
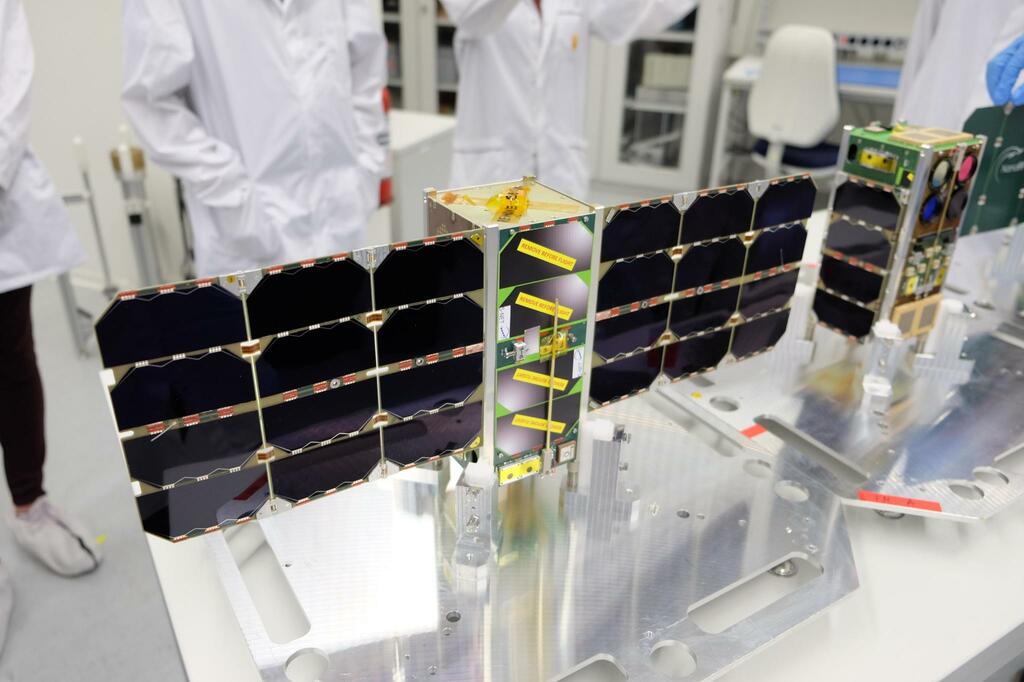
Entwurf basiert auf den Entwicklungen im NanoFF-Projekt der TU Berlin
Nutzlastkapazität: 1700 cm³ und 3 kg
Alleinstellungsmerkmale: redundanter Entwurf, Lageregelung mit Reaktionsrädern, Orbitbestimmung mit GNSS-Empfängern, Antriebssystem für Bahnmanöver, Retroreflektoren zur Laser-Ortung vom Boden, Kommunikation mit 4 MBit/s
Mögliche Anwendungen: multispektrale Erdbeobachtung (30 Meter Bodenauflösung im sichtbaren Bereich, 90 Meter Bodenauflösung im thermalen Infrarot), On-Orbit-Verifikation (OOV)
6 oder 8 Unit / kundenspezifisch
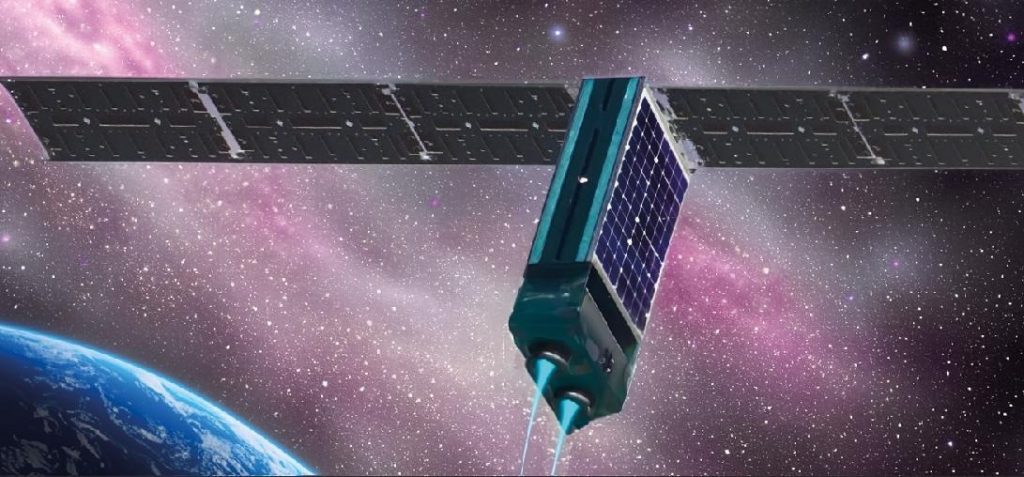
Entwurf basiert auf Erfahrungen im SALSAT-Projekt der TU Berlin
Nutzlastkapazität: 4U und 8 kg
Gesamtmasse: bis zu 16 kg
Alleinstellungsmerkmale: redundanter Entwurf, Lageregelung mit Reaktionsrädern, Orbitbestimmung mit GNSS-Empfängern, Antriebssystem für Bahnmanöver, Retroreflektoren zur Laser-Ortung vom Boden, Kommunikation mit bis zu 100 MBit/s